Maniobra de Pringle durante la hepatectomía laparoscópica y robótica

| Introducción |
A pesar del continuo debate por décadas sobre las ventajas y desventajas del control vascular durante la resección hepática, cuando están disponibles las opciones de con y sin pinzamiento [1-3], la maniobra de Pringle (MP) sigue siendo el tipo de pinzamiento con mayor base en la evidencia [4].
Cuando se necesita, el pinzamiento debería ser simple, rápidamente instalable, reproducible, costo-efectivo y, más importantemente, eficiente (esto es, completo), y no debería interferir con las acciones del cirujano.
Cuando se aplica en la resección hepática laparoscópica o asistida por robot, la MP permite la identificación de las venas hepáticas y los pedículos glissonianos en un campo sin (o casi sin) sangre; reduce la pérdida de sangre; e, importantemente, brinda un control fácil del sangrado (si lo hay), para evitar la conversión a una operación abierta [5].
La MP puede ser usada durante las operaciones hepáticas laparoscópicas, empleando tanto la técnica intra como la extracorporal. Aunque la primera de ellas ha sido estandarizada desde su descripción inicial [6], la última es una técnica desarrollada más recientemente [7], y no ha sido descrita en detalle, así como tampoco las variaciones de la técnica [7-12].
Las dificultades técnicas para obtener un pinzamiento completo, el tiempo perdido para lograr el despinzamiento (que puede prolongar la isquemia y aumentar la pérdida de sangre en casos de hemorragia significativa), y el desarrollo conjunto de abordajes robóticos, representan el ímpetu para diseñar una técnica estandarizada de MP extracorpórea, aplicable tanto en la resección hepática laparoscópica como robótica.
El objetivo del presente estudio fue describir en detalle la técnica empleada por los autores para la MP extracorpórea y comparar la eficacia de las MP intra y extracorpóreas, en términos de eventos intraoperatorios y resultados postoperatorios tempranos.
| Métodos |
> Diseño del estudio
La meta del presente reporte fue brindar una detallada descripción de la técnica de los autores para la MP extracorpórea durante la resección hepática laparoscópica y robótica. Un objetivo secundario fue analizar los resultados quirúrgicos de las MP intra y extracorpórea en una serie grande de resecciones hepáticas mínimamente invasivas, efectuadas en un único centro asistencial con extensa experiencia en operaciones hepáticas abiertas, laparoscópicas y robóticas.
Para el análisis de los resultados a corto plazo, los pacientes fueron divididos en 2 grupos correspondientes a si la operación se había realizado desde diciembre de 2013 hasta noviembre de 2015, o desde diciembre de 2015 hasta diciembre de 2017. Esa dicotomía fue elegida porque se realizó rutinariamente la MP extracorpórea en todas las resecciones mínimamente invasivas desde diciembre de 2015.
> Indicaciones para la maniobra de Pringle
La MP fue preparada antes de la resección parenquimatosa, en todos los casos de resección hepática laparoscópica y robótica, como para una resección hepática abierta. La MP fue aplicada cuando el plano de sección no estaba seco, en caso de sangrado, a criterio del cirujano.
La política de los autores fue la de usar un pinzamiento intermitente, con 15 minutos (hígado normal) o 10 minutos (enfermedad hepática crónica o lesión del hígado inducida por la quimioterapia) de pinzamiento y 5 minutos de despinzamiento
> Técnica quirúrgica de la MP intracorpórea
La técnica quirúrgica de la MP intracorporal ha sido descrita en detalle previamente [6,13]. De manera resumida, se coloca una cinta de algodón de 80 cm de largo alrededor del ligamento hepatoduodenal y se la exterioriza a través de un trócar de 12 mm.
La cinta se pasa luego a través de un torniquete de 5 cm. El torniquete es empujado dentro de la cavidad abdominal. Se coloca un clip a 2 o 3 cm por encima del torniquete y se cortan los extremos de la cinta. La MP intracorpórea se realiza bajo visión directa: el torniquete es empujado hacia el pedículo hepático para ocluir el flujo de entrada y se lo ajusta con un clip. La reperfusión hepática se logra con el retiro del clip y la liberación del torniquete, para restaurar el flujo de entrada al hígado.
> Técnica quirúrgica para la MP extracorpórea
• Posiciones del paciente
Las técnicas quirúrgicas para las resecciones hepáticas laparoscópica [14-16] y robótica [17-19] usadas en el centro en donde se desempeñan los autores de este trabajo, ya han sido descritas en detalle previamente. De manera resumida, en la mayoría de los casos, los pacientes fueron colocados en posición supina, con ambas piernas separadas en la mesa de operaciones.
Para las resecciones del lado derecho los pacientes fueron colocados en una posición modificada de semi-decúbito izquierdo, en la que sólo la parte superior del cuerpo fue girada hacia el lado izquierdo, y la pelvis y las piernas permanecieron en posición supina.
• Posiciones de los trócares
La Figura 1 muestra la posición y tamaño de los trócares usados para los 2 abordajes y del torniquete usado para la MP extracorpórea. Una vez establecido el neumoperitoneo, se insertan 5 trócares, incluyendo un trócar de 5 mm colocado subcostalmente sobre la línea media axilar derecha (R5 o L5). Este último puede ser usado para un sistema de oclusión vascular intermitente extracorpóreo durante la hepatectomía. En el caso de un abordaje robótico, el control del pedículo hepático y la preparación del sistema de oclusión vascular intermitente son efectuados después del acoplamiento del robot (Fig. 2).

FIGURA 1: (A) Posición de los trócares usados en la MP extracorpórea durante la resección hepática laparoscópica y robótica. (B) Equipo para el torniquete utilizado en la MP extracorpórea.
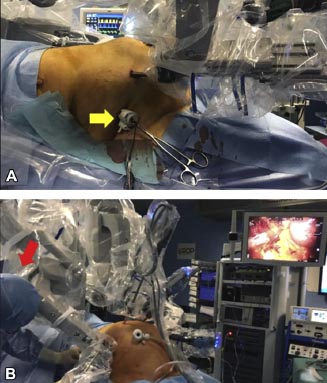
FIGURA 2: MP extracorpórea durante la resección hepática robótica. (A, B) Sesiones de pinzamiento/despinzamiento realizadas por el cirujano asistente (flecha amarilla, sistema de trócar extracorpóreo; flecha roja, cirujano asistente efectuando el pinzamiento).
• Control del pedículo hepático y MP extracorpórea
El lóbulo izquierdo del hígado es elevado utilizando un separador triangular, que es insertado a través de un trócar (R4 o L4), para exponer el pedículo hepático. La pars flaccida del ligamento hepatoduodenal es seccionada, preservando una arteria hepática izquierda cuando está presente.
Se pasa un sujetador (grasper) por el trócar R5 o L5 horizontalmente por detrás del ligamento hepatoduodenal, para colocar una cinta de algodón de 80 cm de largo, pasada a través del trócar R3 o L3, y se lo rodea (Fig. 3A). La cinta se exterioriza luego a través del trócar R5 o L5 y se pasa a través de un catéter (DLP Tourniquet Kit 7” [17,8 cm]; Medtronic Inc.) (Fig. 3B).
La longitud del catéter puede ser acortada de acuerdo con la morfología del paciente (Fig. 3C). El cirujano asistente, colocado sobre el lado derecho o entre las piernas, aplica el pinzamiento intermitente en las operaciones laparoscópicas o robóticas, respectivamente (Fig. 2 y Figs. 3D, 3E). Se presenta un dibujo esquemático de la MP extracorpórea en la Figura 4.
Comentarios
Para ver los comentarios de sus colegas o para expresar su opinión debe ingresar con su cuenta de IntraMed.