Cirugía robótica

Introducción
La revolución de la cirugía mínimamente invasiva al principio de la década de 1990 marcó el comienzo de una nueva era en la que el cirujano no tiene que poner sus manos directamente sobre el cuerpo humano. Una vez que los instrumentos largos fueron colocados entre el cirujano y el paciente, la integración robótica se volvió inevitable. Si se puede llegar a través de una pequeña incisión con un instrumento largo, porqué no se puede hacerlo con un brazo robótico? Poco después se desarrollaron rápidamente los sistemas robóticos comerciales. El concepto detrás de la robótica fue mejorar las características del sentido del tacto del cirujano y permitir que los procedimientos quirúrgicos mínimamente invasivos pudieran hacerse más fluidamente; no obstante, como con cualquier nueva tecnología, surgieron los costos elevados y la dificultad de uso. Una nueva generación de robots está siendo construida más pequeña, más inteligente y menos costosa.
Este artículo discute los desarrollos que llevaron a los sistemas quirúrgicos robóticos así como qué es lo que hay en el horizonte para la nueva tecnología robótica. Los tópicos incluyen cómo lo robótica permite nuevos tipos de procedimientos, incluyendo la cirugía endoscópica transluminal a través de orificios naturales (NOTES del inglés Natural Orifice Translumenal Endoscopy Surgery) en donde no se puede llegar con la mano bajo ninguna circunstancia, y como esos desarrollos conducirán a la nueva generación de robots.
Sistemas comerciales
El daVinci Surgical System (dVSS) fue desarrollado por Intuitive Surgical (Sunny Valley, California). Se convirtió en el primer sistema robótico autorizado por la U.S. Food and Drug Administration (FDA) en el año 2000 para su uso en cirugía laparoscópica general. Después de varios años, la FDA aprobó también al dVSS para cirugías toracoscópica, urológica y ginecológica y también como un adjunto para algunos procedimientos cardíacos. Actualmente, más de 800 dVSS están instalados en hospitales alrededor del mundo.
El sistema tiene visualización tridimensional del campo operatorio, un rango de movilidad de 7 grados, eliminación del temblor y una postura operatoria cómoda sentado [1]. Estas ventajas le permiten a los cirujanos una destreza similar a la manual y aumenta la precisión de las técnicas mínimamente invasivas. Las deficiencias de los robots quirúrgicos son la falta retroalimentación de la tecnología de tacto mientras se opera, la inhabilidad para cambiar instrumentos así como el campo operatorio durante el procedimiento, el gran tamaño del robot con brazos voluminosos y el alto costo de la tecnología [2]. Sin embargo, el dVSS ha probado ser útil en una amplia variedad de aplicaciones en cirugía cardiotorácica, urológica y general [3-5].
Los urólogos han estado especialmente satisfechos con el aumento de la destreza brindado por el dVSS en la remoción de la próstata. El campo operatorio se ubica típicamente en la pelvis profunda y la necesidad de una destreza similar a la de la muñeca humana es difícil de duplicar con las técnicas laparoscópicas convencionales. La realización de suturas es especialmente desafiante en la pelvis estrecha masculina y el dVSS se luce en esa área. Múltiples estudios han mostrado que, con la adecuada experiencia, la prostatectomía robótica es segura y efectiva en los hombres con cáncer de próstata [6].
Otros sistemas robóticos en el mercado actual incluyen el RoboDoc, un sistema de cirugía ortopédica desarrollado por la University of California Davis y comercializado por Integrated Surgical Systems (Sacramento, California). La implementación de este dispositivo le brindó a los cirujanos ortopedistas una mejor exactitud en el tallado de la diáfisis femoral, del 75% al 96%, mientras se preparan los huesos para los implantes protésicos. Un sistema similar conocido como el Acrobat ha sido diseñado por Limited (London, England) para los reemplazos completos de rodilla complicados. La diferencia significativa lograda por estos dispositivos llevó a la aceptación y comprensión de que la tecnología de la información podía ser aplicada en otros campos en cirugía.
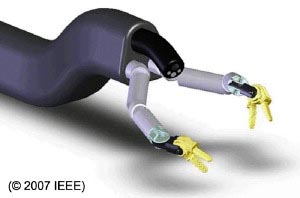
Hay una gran demora entre la idea y la comercialización de productos y la cirugía robótica está sólo en su infancia. Varios desarrollos nuevos fascinantes pueden cambiar el modo en que se usarán los robots en un futuro cercano. Estas tecnologías nuevas están aún en una etapa experimental pero brindan un vistazo de lo que la nueva generación de robots ofrecerá. La miniaturización de la tecnología robótica parece ser el tema de la nueva generación de dispositivos. Los robots que son más pequeños que los actuales sistemas tienen una ventaja natural debido a que son más fáciles de desplegar y pueden ser usados en más escenarios. El grupo de la University of Washington ha desarrollado un prototipo más pequeño que tiene la capacidad de ser montado sobre el paciente y controlado remotamente (Fig. 1). Este robot, llamado RAVEN, es un prototipo que ha sido probado en el campo quirúrgico. Dado su pequeño tamaño y sus mejoras actualizadas, puede ser empleado en áreas remotas y teleoperado [7]. Otras tecnologías robóticas permiten que el cirujano haga recorridas de sala mientras se halla sentado en una ubicación remota. Este dispositivo desarrollado por el Dr. Yulun Wang es llamado RP-7 (In Touch Health, Santa Barbara, California) y es una plataforma robótica móvil que le permite al médico estar presente remotamente controlando los movimientos del robot por Internet. Los pacientes entrevistados sintieron que el encuentro fue positivo y fueron capaces de creer completamente que estaban comunicados con su médico en persona, aún si el mismo estaba lejos de su cama [8].
· FIGURA 1: RAVEN de la Universidad de Washington.

La robótica brinda una posibilidad única de separar al cirujano del paciente. Esa separación se puede medir en pies o en miles de millas. La telecirugía junto con el telemonitoreo han sido testeados ahora en varios entornos y han mostrado ser factibles y beneficiosos. La resección de la vesícula a través del Océano Atlántico y el monitoreo de cirujanos en Canadá [9], son ejemplos de cómo la tecnología está acercando rápidamente el día en que cualquier cirujano puede ser conectado con varios colegas a quienes puede ser capaz de consultar y en algunos casos ser asistido durante procedimientos quirúrgicos complejos.
A medida que las técnicas quirúrgicas mínimamente invasivas se desarrollan continuamente hacia la reducción de la invasión de los procedimientos quirúrgicos, la tecnología robótica se vuelve más crucial. La NOTES es un nuevo abordaje a la cirugía abdominal que promete reducir aún más la invasión mediante el acceso a la cavidad peritoneal a través de un orificio natural. Teóricamente, la eliminación de la incisión externa evita la infección de la herida, reduce adicionalmente el dolor y mejora la estética y los tiempos de recuperación [10]. La NOTES está siendo demostrada en la actualidad en estudios en humanos. La primera colecistectomía asistida transvaginal en los Estados Unidos fue realizada en marzo de 2007 [11]. Seguidamente, la primera colecistectomía transgástrica, también en los Estados Unidos, fue efectuada en junio de 2007 utilizando el EndoSurgical Operating System (USGI Medical, San Juan Capristano, California) [12]. Se han identificado limitaciones significativa con el uso de instrumentos endoscópicos convencionales. Por ejemplo, es difícil realizar procedimientos de NOTES utilizando la imagen limitada en dos dimensiones del entorno quirúrgico cuando la orientación exacta del endoscopio flexible no es intuitivamente obvia. Además, la falta de triangulación entre la imagen y los instrumentos limita la percepción en profundidad y reduce la destreza quirúrgica [13]. Se necesitan nuevos instrumentos para realizar estos procedimientos porque el simple deslizamiento de la mano dentro del campo no es posible. La robótica ofrece las mejores soluciones bajo esas circunstancias.
Plataforma endoscópica flexible
Una plataforma endoscópica flexible para la NOTES, con actuación robótica y visualización mejorada, es la próxima área de desarrollo. Se ha estado trabajando en dirección al desarrollo de un sistema robótico endoluminal para brindar visualización e instrumentación diestra para la realización de cirugías endoluminales [14]. Un dispositivo de primera generación para cirugía endoluminal teleoperada, el ViaCath System, ha sido desarrollado por Endo Via Medical (Norwood, Massachussets). El dispositivo consiste en una consola y 2 instrumentos flexibles colocados a lo largo de un endoscopio estándar. Cada instrumento, junto con el brazo de posicionamiento, brinda 7 grados de libertad de movimiento. Varios efectores terminales han sido desarrollados específicamente para este equipo, incluyendo un porta-agujas, pinzas, tijeras y electrobisturí. Un sistema robótico de segunda generación está siendo desarrollado en la actualidad en la Purdue University (Fig. 2).
· FIGURA 2: Sistema quirúrgico endoluminal robótico desarrollado en la Universidad Purdue [14].
Una plataforma de 4 canales (TransPort, USGI Medical, San Capristano, California) basada en el sobretubo cerrado ShapeLock, ha sido desarrollada [15]. Este dispositivo incorpora un volante independiente para el extremo distal de modo que, una vez que el endoscopio está posicionado, la base del mismo puede congelarse mientras que aún es posible el movimiento en 4 direcciones de la punta. Además, el tamaño de los canales de trabajo permite la inserción de pinzas de 5 mm, similares a aquellas empleadas en las herramientas laparoscópicas existentes, para una retracción más agresiva de los órganos. El EndoSurgical Operating System, incluyendo la TransPort Multi-lumen Operating Platform, están disponibles comercialmente en la actualidad. Los instrumentos basados en la plataforma endoscópica flexible robótica demostraron el potencial para mejorar lo destreza quirúrgica en los procedimientos por orificios naturales; no obstante, esos dispositivos permanecen restringidos por el tamaño del orificio natural y no brindan una plataforma suficiente para la visualización y aplicación de fuerzas fuera del eje.
Plataformas robóticas miniatura
La miniaturización de las herramientas robóticas y la habilidad para colocar robots totalmente dentro de la cavidad peritoneal ofrece beneficios significativos en los procedimientos por orificios naturales. Una vez insertado, el robot puede ser utilizado dentro del peritoneo sin las restricciones típicas de un dispositivo endoscópico flexible manipulado externamente. Los robots pueden ser posicionados para brindar visualización y manipulación de los tejidos dentro de cada cuadrante de la cavidad peritoneal. Múltiples robots miniatura puede ser colocados dentro de la cavidad abdominal, cuyo numero no está limitado por el pequeño diámetro del orificio natural. Dichos robots equipados con imagen estereoscópica podrían brindar al cirujano una necesaria percepción de mayor profundidad y permitirían la triangulación entre la imagen plana y el movimiento de los instrumentos.
Los robots miniatura móviles ofrecen una plataforma controlada remotamente para la visión y la asistencia en la tarea quirúrgica. El diseño básico de un robot móvil consiste en 2 ruedas de conducción independiente con un perfil helicoidal que permite movimientos hacia delante, atrás y giros. Se emplea una cola para prevenir la contrarrotación. Las capacidades de los robots con una plataforma móvil han sido demostradas en múltiples procedimientos en modelos porcinos como se muestra en la Figura 3. Un robot móvil con una cámara de foco ajustable ha brindado la retroalimentación visual exclusiva para la remoción laparoscópica de la vesícula biliar sin daño a las estructuras peritoneales [16].
La habilidad del robot con una plataforma móvil para brindar asistencia en la tarea también ha sido demostrada a través de la toma exitosa de 3 muestras de tejido hepático para biopsia [17]. La cámara a bordo brinda visualización para ubicar un sitio adecuado para la biopsia y la plataforma móvil permite al robot atravesar la cavidad peritoneal hacia el sitio elegido. La factibilidad de usar robots móviles en vivo para procedimientos de NOTES ha sido exitosamente demostrada en un modelo porcino [18]. Un robot móvil fue introducido a través de la apertura esofágica y fue insertado dentro del estómago a través de un sobretubo estéril utilizando un endoscopio alto estándar. Fue capaz de explorar la cavidad gástrica antes de avanzar dentro de la cavidad peritoneal a través de una incisión transgástrica. Una vez completamente insertado, se avanzó un endoscopio para ver al robot móvil y poder maniobrarlo dentro de la cavidad peritoneal. Luego el robot fue retraído dentro de la cavidad gástrica y se cerró la incisión transgástrica. La habilidad para navegar la cavidad peritoneal no fue restringida desde afuera y fue muy ventajosa, llevando a un nuevo conjunto de experimentos en los que múltiples robots podrían ser utilizados.
Comentarios
Para ver los comentarios de sus colegas o para expresar su opinión debe ingresar con su cuenta de IntraMed.










